Stair climbing robot - KTH


















KTH - Case project for Electrolux
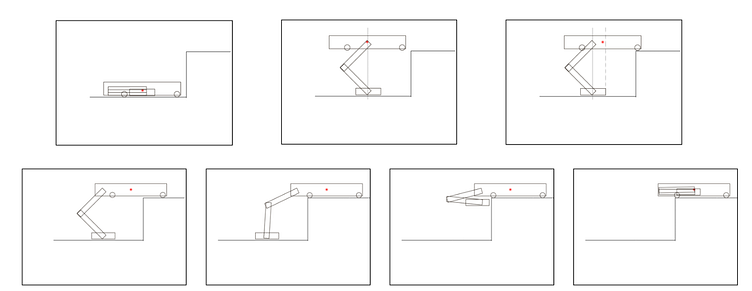
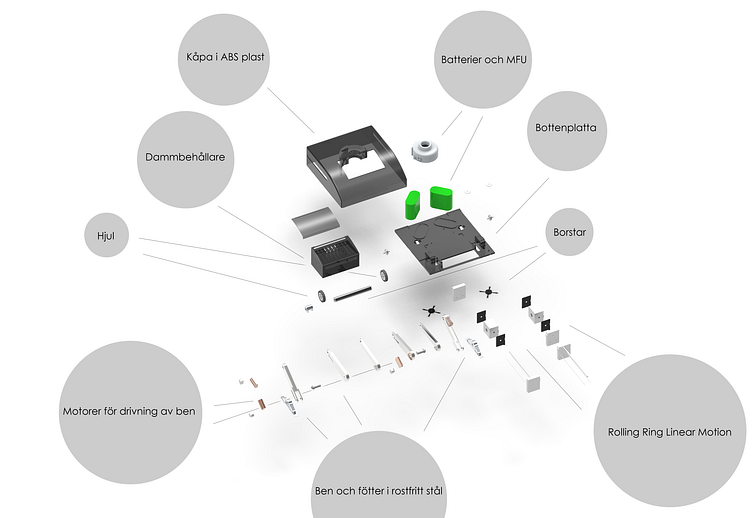
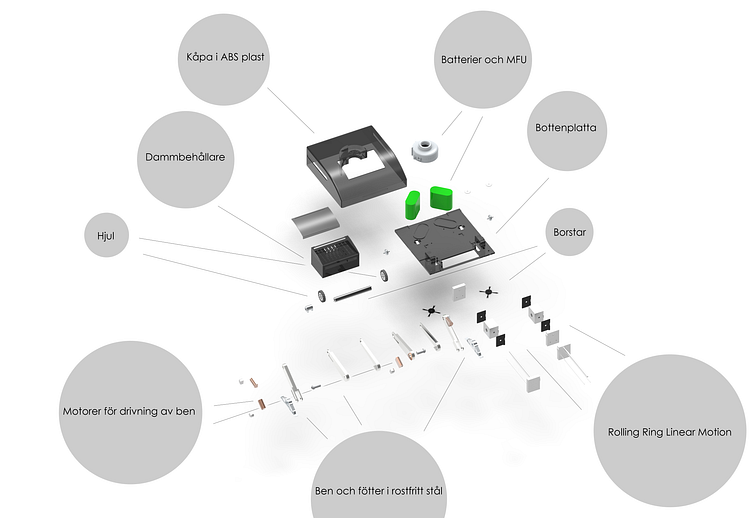
The robot works by the usage of joint mechanisms and links for vertical movement and rolling ring linear motion bearings for horizontal movement.
The challenges in this project was to dimension the parts to keep centrum of mass from tipping the robot over. This, while dimensioning the entire construction to fit and move freely on the steps of the stairs.
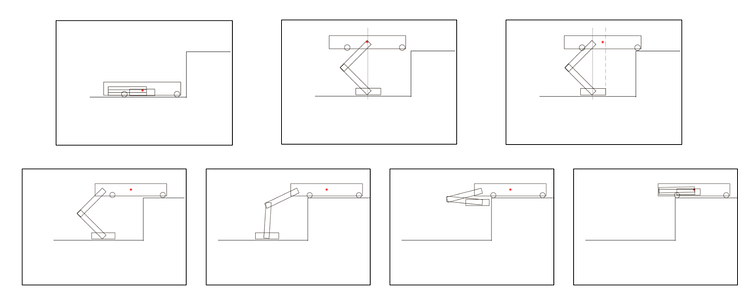
To do this, force equilibrium was used as well as a mapping of the centrum of mass throughout the entire motion. Seen in Picture 2 is the wheel touching the stairs before the centrum off mass goes past the edge of the "foot", providing support so that the robot does not tip over.
KTH - Case project for Electrolux
The robot works by the usage of joint mechanisms and links for vertical movement and rolling ring linear motion bearings for horizontal movement.
The challenges in this project was to dimension the parts to keep centrum of mass from tipping the robot over. This, while dimensioning the entire construction to fit and move freely on the steps of the stairs.
To do this, force equilibrium was used as well as a mapping of the centrum of mass throughout the entire motion. Seen in Picture 2 is the wheel touching the stairs before the centrum off mass goes past the edge of the "foot", providing support so that the robot does not tip over.
KTH - Case project for Electrolux
The robot works by the usage of joint mechanisms and links for vertical movement and rolling ring linear motion bearings for horizontal movement.
The challenges in this project was to dimension the parts to keep centrum of mass from tipping the robot over. This, while dimensioning the entire construction to fit and move freely on the steps of the stairs.
To do this, force equilibrium was used as well as a mapping of the centrum of mass throughout the entire motion. Seen in Picture 2 is the wheel touching the stairs before the centrum off mass goes past the edge of the "foot", providing support so that the robot does not tip over.
KTH - Case project for Electrolux
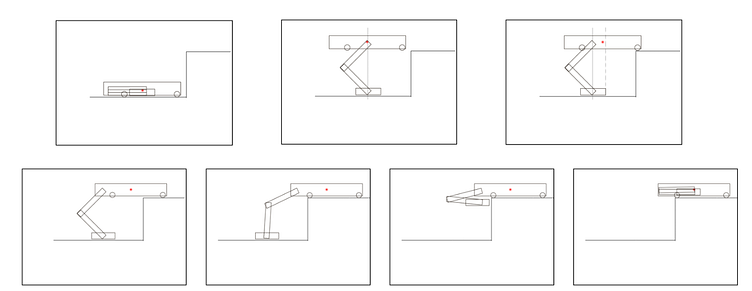
The robot works by the usage of joint mechanisms and links for vertical movement and rolling ring linear motion bearings for horizontal movement.
The challenges in this project was to dimension the parts to keep centrum of mass from tipping the robot over. This, while dimensioning the entire construction to fit and move freely on the steps of the stairs.
To do this, force equilibrium was used as well as a mapping of the centrum of mass throughout the entire motion. Seen in Picture 2 is the wheel touching the stairs before the centrum off mass goes past the edge of the "foot", providing support so that the robot does not tip over.
KTH - Case project for Electrolux
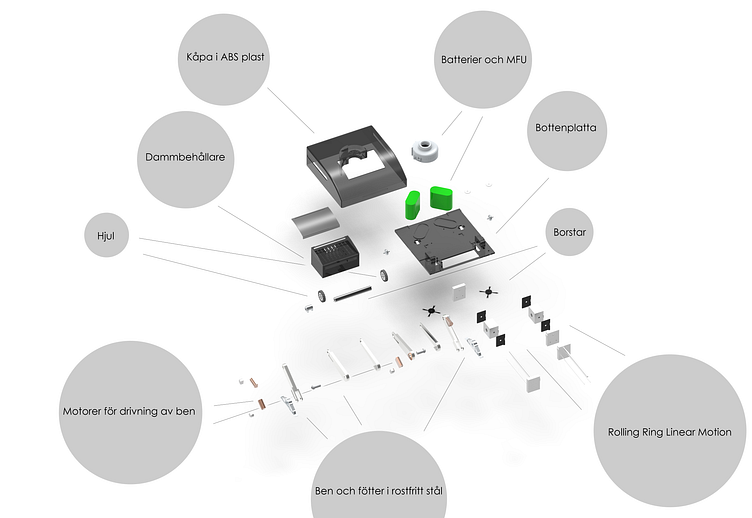
The robot works by the usage of joint mechanisms and links for vertical movement and rolling ring linear motion bearings for horizontal movement.
The challenges in this project was to dimension the parts to keep centrum of mass from tipping the robot over. This, while dimensioning the entire construction to fit and move freely on the steps of the stairs.
To do this, force equilibrium was used as well as a mapping of the centrum of mass throughout the entire motion. Seen in Picture 2 is the wheel touching the stairs before the centrum off mass goes past the edge of the "foot", providing support so that the robot does not tip over.
